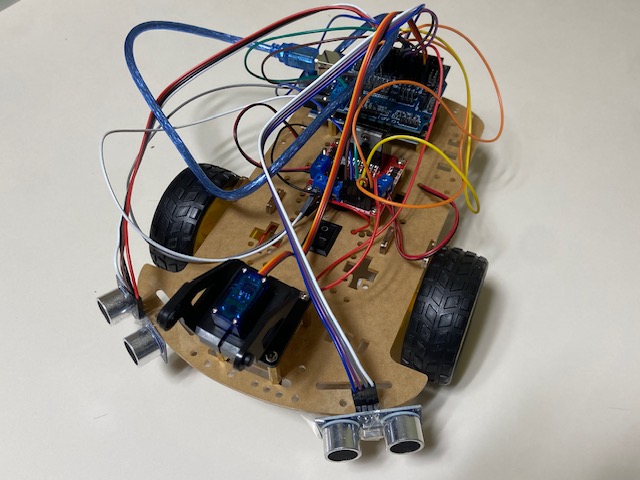
How it works
This is a robot that can go through maze.This robot can find the way without collapsing by detecting obstacles and changing directions. This can be done by two radar sensors that is attatched at the side of the robot. The sensors are distinguished by the direction. If the obstacle is detected at the left sensor of the robot, the robot is programmed to turn right for 0.3miliseconds. If the obstacle is detected at the right sensor of the robot, the robot is programmed to turn left for 0.3miliseconds. This enables it to avoid the crash and go through the route. In addition, in order to avoid infinite loop, it is programmed to turn opposite direction when it repeats turning same direction for several times.
Future usage
This can be used when it goes through diverse situations that humans can not go through like inside of a small cave or construction site. This robot can find the way to go through without any control.
Future development
I'd like to add other moving methods in order to go through diverse terrains. There are limitations on wheel based moves. To solve this problem, adding legs or propellors can give the robot another option to move. Also, adding camera can help collect data and make more usabilities. AI camera can identify the objects and do more actions.