How it works
The two legs move like human legs. This method can make the robot move forward.
"Crawlling" is usefull when the robot has to go through places with low height like cave or holes. It can also overcome uneven terrains by two legs.
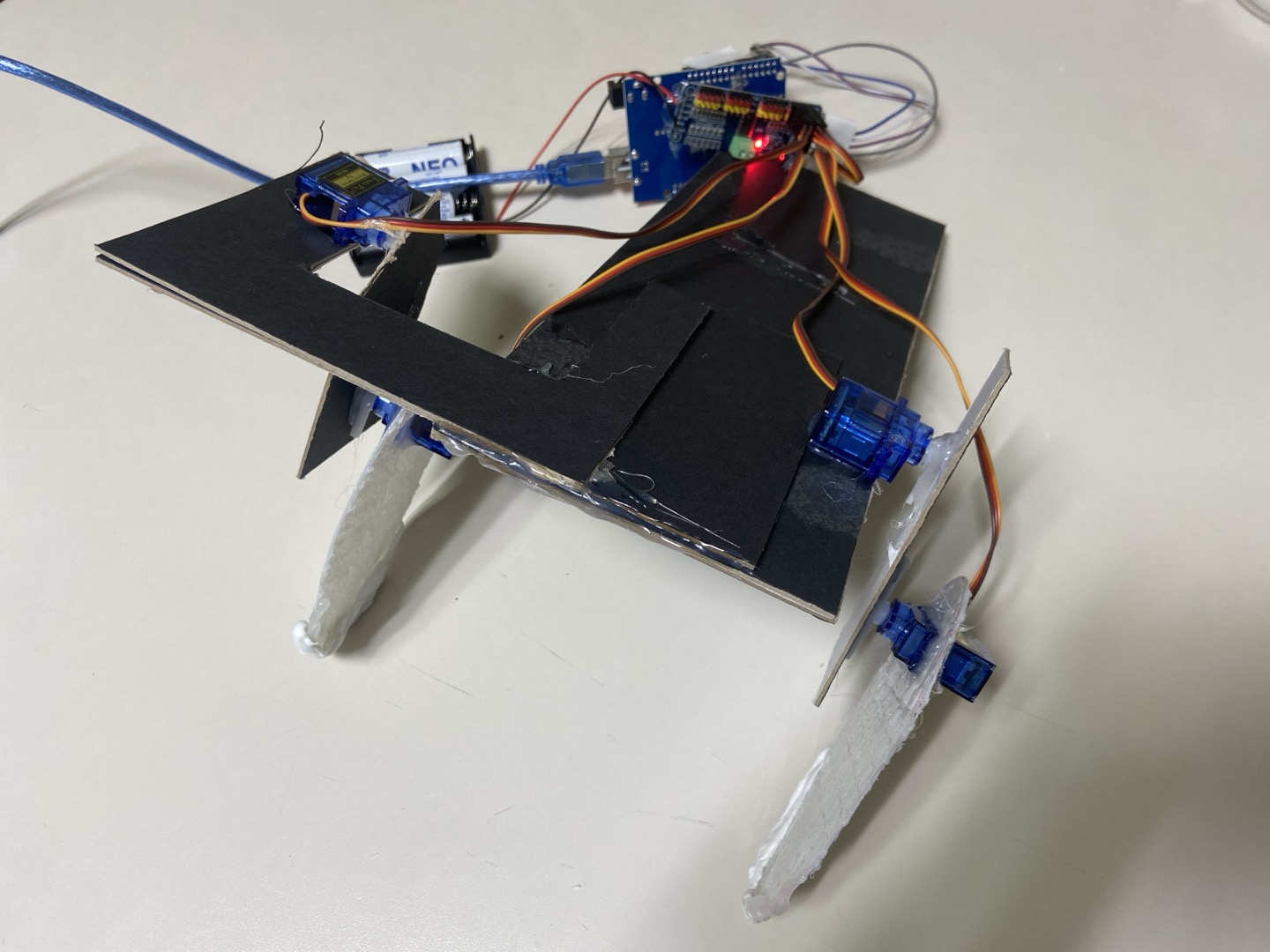
The two legs have two motors each. one motor is located at the upper leg part and the other one is located at the knee part.
What matters is how the moverment can make the power to move. It is same as human movemnet. When the upper part of the leg is lifted, it bends its lowerpart of the leg.
When the upper part is lowered, the robot moves forward by the friction between the robot leg and floor.
This simple mechanism is repeated in left and right legs.
This is what happens when the robot has three legs. There are 2 types of movement.
First movement is moving two legs at the side to front while middle leg remains still.
The second movement is two legs at each side are moving at the same time, while the other side leg remains still.
While these methods of moving are stable, they seem very slow.
three-leg movement .1
three-leg movement .2
Future usage
Because the robot moves in low stance, it can move in a stable condition.
This enables the robot to move in slopes.
Slope can be overcomed by CRAWLLER thanksto its unique movement.
If there is a situation that a robot have to move over a slope, CRAWLING can be effective.
Future development
Development regarding the material of the CRAWLLER's foot can be important.
When we put magnetic material on the feet,
the robot can climb metal-made things like bridges or other infrastructures.
If we add sharp materials on the feet, it can climb on trees like cats.